步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给 电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周 期性的误差而无累积误差,使得在速度、位置等控制领域,用步进电机来控制变的非常的简 单。本文设计了一种基于AT89S52单片机和VC++的步进电机控制管理系统,能轻松实现对步进 电机的基本控制及状态实时显示。
使用、控制步进电机必须由环形脉冲源、功率放大电路等部分所组成控制管理系统,脉冲信号 一般由单片机或CPU产生,一般脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则 越大。功率放大是驱动系统最重要的部分。步进电机在一定转速下的转矩取决于它的动态 平均电流而非静态电流,平均电流越大,电机力矩越大,要达到平均电流大,这就需要驱动 系统尽量克服电机的反电势。因而不同的场合采取不同的驱动方式。到目前为止,驱动方式 一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流等。
本文设计系统中,脉冲信号由单片机AT89S52产生并分配给步进电机各相,功率放大部分由驱动电路完成,系统结构框图如图1所示。
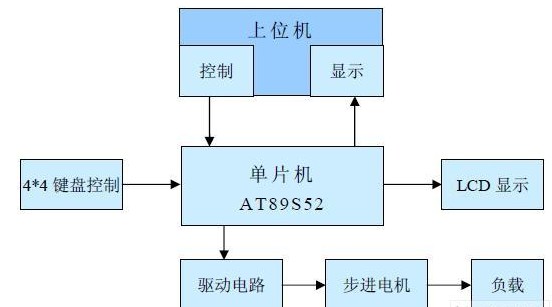
本文所设计系统中,步进电机模块采用35BY48S03永磁式步进电机,用户利用4*4键盘或上位机的控制界面实现指令输入,采用上位机或1602字符型液晶模块实时显示运行状态。
单片机的最小系统电路包括时钟电路和复位电路。本文所设计系统中,时钟电路采取内 部振荡方式,所得的时钟信号较为稳定,实用电路中使用较多[3]。复位电路作用是使单片机 的片内电路初始化,使单片机从一种确定的状态开始运行。复位电路采取2种基本形式:上 电复位、开关复位。
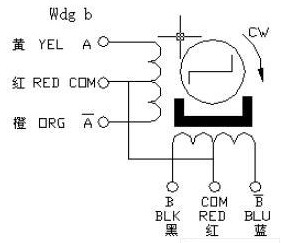
35BY48S03型步进电机接线所示,从图中能够准确的看出,电机共有四组线圈,四组线圈的一个端点连在一起引出,这样一共有5根引出线。要使步进电机转动,只要以一定的 次序轮流给各引出端通电即可,加电的方式能有多种,包括单相驱动、双相驱动、单-双 相驱动等,相应步进角有整步和半步区分。在本文设计的系统中,采用单相驱动和单-双相 驱动两种加电方式驱动步进电机运转。
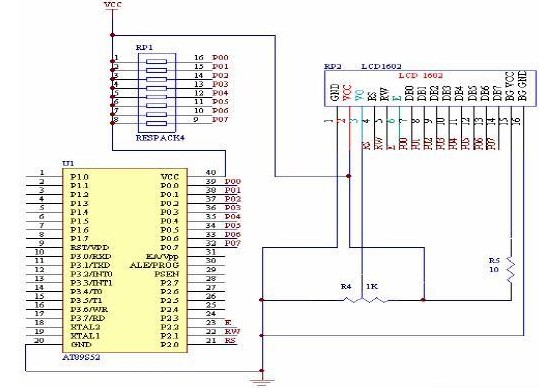
根据该电机参数,不难设计出驱动电路,因其工作电压为12V,最大电流为0.26A,因 此用一块开路输出达林顿驱动器(ULN2003)作为驱动,通过P2.7-P2.4来控制各线圈的接通与 切断。如果要改变电机的转动速度只要改变两次接通之间的时间,而要改变电机的转动方向, 只要改变各线 串行通信电路
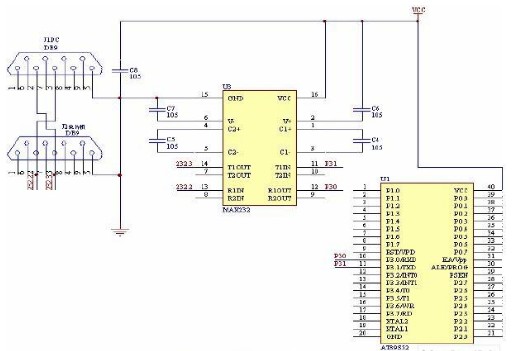
在PC机内接有PC16550(和8250兼容)串行接口、EIA-TTL的电平转换器和RS-232C连 接器,除鼠标占用一个串行口外,还留有两个串行口给用户,这就是COM1(地址3F8H-3FFH) 和COM2(地址2F8H-2FFH),通过这两个口,可以连接串行通信设施,如单片机、仿真机 等。由于单片机的串行发送和接收线TXD和RXD是TTL电平,而PC的COM1或COM2的 RS-232C连接器(D型9针插座)是EIA电平,因此单片机需加接MAX232芯片,通过串行电 缆线和PC相连接。本文所设计的串行通信电路如图4所示。
液晶采用显示容量为2行16个字的1602液晶,1602采用标准的16脚接口,内部的字符发 生存储器(CGROM)已经存储了160个不同的点阵字符图形,每一个字符都有一个固定的 代码[5]。设计电路图如图5所示。
软件设计可分为两个部分:上位机软件设计和下位机软件设计。上位机软件设计包括: 上位机控制环境设计、上位机通信程序设计以及上位机程序的封装发布;下位机软件设计包 括:键盘扫描程序、下位机通信程序、主驱动程序、测试部分程序、显示部分程序。
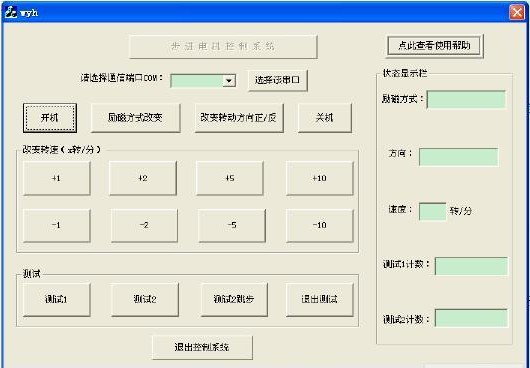
Visual C++设计了一套基础类库(Microsoft Foundation Class Library, MFC), MFC把编 程规范中的大多数内容封装成为各种类,使程序员从繁杂的编程中解脱出来[6]。根据系统设 计需要,设计一个基于对话框的应用程序即可,如图6所示。
为实现上位机与下位机通信,利用Microsoft提供的串行通信ActiveX控件。该控件的相 应文件是MSCOMM32.OCX。在基于对话框的程序中使用控件,需要进行以下几方面操作: 拖动控件图标到窗口上,创建控件ID。在对话框头文件中声明CMSComm类的变量及引用控 件类头文件。创建CMSComm类的实例。建立控件事件响应代码框架[7]。
在电机状态改变后,由下位机将代表各状态的数据发送给上位机,上位机接收到后存入 一个数组内,根据此数组内容刷新各编辑框内容,以达到实时显示的目的。此处共有五个数 据,放入rxdata数组中,分别代表励磁状态、转动方向、速度、测试1计数、测试2计数。上 位机MSComm控件SetRThreshold属性设置为5,则当下位机将五个数据发送完后,上位机立 即触发OnComm事件,进行接收[8]。
当我们安装VC++6.0时,如果选择了ACtiveX控件项(自定义安装),MSComm控件就 会自动安装在计算机上了,并在系统文件夹下多了3个文件:Mscomm.srg,Mscomm32.ocx, Mscomm32.dep,即MSComm控件已经过授权,但要注意的是,如果程序移植到其它没有安 装VC软件的PC机上,必须将其使用“执照”License 在注册表中登记注册,才可以正常运行。 为了正常运行, 还需要将VC开发的可执行文件与运行所需的三个动态链接文件 MFC42D.DLL,MFCO42D.DLL,MSVCRTD.DLL放在同一个文件夹中。使用Installshield软 件进行封装实现以上要求即可。
本文所设计系统中,采用单相驱动和单-双相驱动两种加电方式驱动步进电机运转,即 单相四拍和单-双相八拍驱动,分别为整步和半步运转,步进角分别为7.5度和3.75度,不同 的驱动方式其状态表不同,两种驱动方式的波形及状态表如下,其中1代表高电平,表示驱 动的磁极绕组通电;0代表低电平,表示驱动的磁极绕组不通电。

按照设计要求改变转速,则只要改变P2.7-P2.4轮流改变电平的时间即可达到要求,这个 时间不应采用延时来实现,因为会影响到其他功能的实现。这里以定时的方式来实现,晶振 频率为11.0592M,采用T0方式1定时。主程序流程图如图7所示:
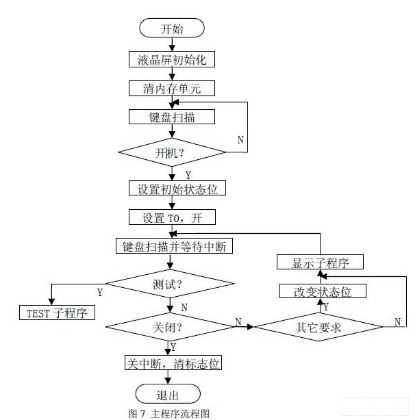
系统上电后,首先进行初始化,包括液晶屏初始化及将程序所用到的内存单元(开关机 状态标志位7FH、正反转标志位7EH、单相励磁或单双相励磁标志位7DH、测试标志位7CH、 当前速度寄存单元2EH)清零。然后检测是否开启电机,检测到开信号后,设置状态位,7FH=1,7EH=1,7DH=1,2EH=10,代表起始状态设置为:单双相励磁正转,起始速度为10r/m。
设置 T0 相关参数后,开始定时,同时检测键盘是否有其它请求发生,如果有,则改变 相应的状态位,并改变单片机输出波形,控制步进电机运行状态改变。
串行通信的编程方式有两种查询方式:查TI 或RI 是否为“1”。中断方式:如果预先开 了中断,当TI、RI 为“1”,会自动产生中断。两种方式中当发送或接受数据后都要注意清 TI 或RI。本文所设计系统中,下位机采用查询及中断两种接收方式,接收上位机的控制指 令;发送采用查询方式,将当前电机运行状态信息发给上位机实时显示。
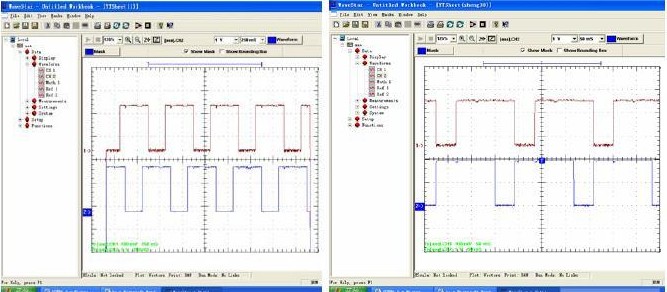
利用示波器测量P2.7-P2.4口产生的波形,以测试电机的激励脉冲是否与理论相符,所测 波形如图8、9所示。图8是在单-双相八拍励磁方式,转速为10转/分的情况下,测量出的P2.7 和P2.5波形,即A,/A的激励波形。图9是在单相四拍励磁方式,转速为30转/分的情况下, 测量出的P2.7和P2.6波形,即A,/B的激励波形。
上位机控制操作和键盘控制操作可以单独发出指令,也可以交互发出指令,该系统应用 环境较广。经测试,所设计系统可以很好的达到设计要求,可以实现对步进电机的基本控制 及状态实时显示。
本文设计出的步进电机控制系统,可以实现对步进电机的基本控制及运行状态的实时显 示。该系统实用性强,操作方便,经测试取得了良好效果。经过一定的技术改进后,可以应 用于包装机械的物料计量、包装膜供送、横封等过程中,精确控制执行机构的运行速度和运 行位置。利用步进电机替代传统的机械或其它方式,不仅能使包装机械结构变得简单、调节 方便、可靠性增加,而且精度会得到很大提高。
关键字:引用地址:采用AT89S52和VC++的实现步进电机实时显示控制系统模块设计
下一篇:采用DDS技术与AD8302芯片实现了数字化频率特性测试仪的设计
0引言 步进电机是将电脉冲信号转变为角位移或线位移的开环控制器件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,它的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。为实现对步进电机的控制,一般可采用单片机为控制器,通过一些大规模集成电路来控制其脉冲输出频率和脉冲输出数以实现步进电机的控制,然而整个系统的准确性、可靠性都存在缺陷。本系统是为实验室某项目服务的子系统,系统的研究目的在于精确、快速、稳定地调节实验装置的相对移动,找到最佳位置、角度安放装置,故本系统拟采用浮点型DSP28335作为系统控制器,拟采用其集成的PWM输出模块,减少外围电
全球领先的半导体解决方案供应商瑞萨电子株式会社与全球领先的步进电机供应商美蓓亚三美株式会社宣布,联合开发基于旋转变压器(角度传感器)的步进电机和电机控制解决方案,并面向机器人、办公自动化(OA)设备,以及医疗/护理设备进行了优化。瑞萨电子与美蓓亚三美携手开发的基于旋转变压器传感器的步进电机和电机控制解决方案,可满足电动机更高精度控制、小型化以及应对环境影响更强抵抗力的需求。 美蓓亚三美在车用旋转变压器传感器领域拥有良好的市场业绩,并首次开发了面向步进电机的新型旋转变压器,用于机器人、办公自动化设备和医疗/护理设备等消费及工业设备应用。作为全球32位微控制器(MCU)市场的领导者(注2),瑞萨开发了一款支持美蓓亚三美新
控制方案 /
转是转了,但是不是感觉有点不太对劲呢?太慢了?别急,咱们继续。根据本章开头讲解的原理,八拍模式时,步进电机转过一圈是需要64个节拍,而我们程序中是每个节拍持续 2 ms,那么转一圈就应该是 128 ms,即1秒钟转7圈多,可怎么看上去它好像是7秒多才转了一圈呢? 那么,是时候来了解“永磁式减速步进电机”中这个“减速”的概念了。图9-7是这个 28BYJ-48 步进电机的拆解图,从图中可以看到,位于最中心的那个白色小齿轮才是步进电机的转子输出,64个节拍只是让这个小齿轮转了一圈,然后它带动那个浅蓝色的大齿轮,这就是一级减速。大家看一下右上方的白色齿轮的结构,除电机转子和最终输出轴外的3个传动齿轮都是这样的结构,由一层多齿和一层少齿构
转动精度与深入分析 /
摘 要: 本文提出了一种基于VC0701和热释电红外传感器实现的人体检测系统的设计方法。该系统在高噪声环境下,尤其是户外,具有较高的人体识别率。 关键词:CMOS成像;红外传感;人体检测;太阳能 目前,大多数基于图像的安防设备都采用CCD或者CMOS传感器成像,后端DSP处理的模式,根据序列图像的差分运算进行人体检测。这种方法容易受到光线变化、树枝摆动、雨雪天气等外界因素的影响,经常产生虚警。为了消除上述干扰,需要特定的算法,从而增加了系统设计的复杂性。本文介绍了一种由红外传感器和CMOS摄像头实现的高性能、低成本的人体检测系统。此外,整个系统利用太阳能工作,还具有环保、节能的特点。 系统的工作原理 系统的结构如图1
引言 在现今社会中,电话网络报警以其快捷有效的优点得到普遍的应用。已逐步成为计算机的主流接口的通用串行总线USB很好地适应了现代计算机多媒体功能的拓展。目前通用的报警平台的接口是采用PCI卡价格贵,且不能即插即用。采用USB接口代替PCI卡,不仅降低了成本,而且可以提高管理平台的易用性和可维护性。本文在VC++下实现的小区报警管理平台的主要功能为:接收从用户报警系统通过电话网络传输来的报警信息(包括用户信息以及具体警报类型等),再将报警信息通过USB接口传入监控主机,与预先存入ADO(Activex Data Objects)数据库的用户信息进行查找,确定具体用户信息,以便及时对小区内警情进行处理。系统主要由接收报警信息预处
单片机实现的步进电机控制系统具有成本低、使用灵活的特点,广泛应用于数控机床、机器人,定量进给、工业自动控制以及各种可控的有定位要求的机械工具等应用领域。步进电机是数字控制电机,将脉冲信号转换成角位移,电机的转速、停止的位置取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,非超载状态下,根据上述线性关系,再加上步进电机只有周期性误差而无累积误差,因此步进电机适用于单片机控制。步进电机通过输入脉冲信号进行控制,即电机的总转动角度由输入脉冲总数决定,而电机的转速由脉冲信号频率决定。步进电机的驱动电路是根据单片机产生的控制信号进行工作。因此,单片机通过向步进电机驱动电路发送控制信号就能实现对步进电机的控制。 1 系统设计原理 步进
设计 /
应学弟们的要求特意将步进电机的速度控制函数完善。 重点:这里只是速度控制函数, 没有加减速曲线! 没有记录步数! 只是简单的把步进电机当成直流电机用! 很初级的一个程序! 程序的下载链接在这里 开发平台Keil5 单片机 Stm32F407 接下来 我就程序的实现过程给大家进行分享 第一部分是实现的机制介绍 详细链接 在这里!主要就是通过修改 PSC和ARR寄存器的值,我们可以修改 定时器的溢出频率!而我们的定时器模式设置成 PWM输出模式, CCR寄存器 我们设置一个较小的值*(我们要控制脉冲的频率 ,所以单个脉冲的宽度是我们不关心的!) 修改了 PSC 和ARR值之后 我们就能轻松实现对步进电机的速度进行控制
速度控制函数 /
引言 被动声源探测定位技术是一种利用声学传声器阵列和电子装置接收运动目标的辐射噪声,以确定目标所处位置的技术。 本文正是基于声探测技术原理和成熟的微电子技术, 采用TI公司的32位浮点DSP芯片TMS320VC33-150来实现声源目标的探测定位算法,并辅之以ADC、CPLD、单片机等器件来实现声源信号的采集、系统逻辑控制以及通信功能。对于数字电路的逻辑控制功能,本文选用了Altera公司的CPLD芯片EPM7128AETC100-10来实现。该芯片功耗低、资源丰富、内部延时固定,有助于时序逻辑电路的设计。本系统主要分为两部分:声探测系统数字电路的硬件实现和DSP软件设计。系统现已完成调试,运行稳定,探测效果较好。 系统功
设计指南 (埃利斯)
驱动控制技术及其应用设计研究
直播回放: 借助 TI DLP® 技术,开始您的下一代4K显示应用设计
有奖征文:邀一线汽车VCU/MCU开发工程师,分享开发经验、难题、成长之路等
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!第三期考题上线,跟帖赢好礼~
【下载】LAT1396 STM32CubeIDE实用技巧之STM32H7双核调试的配置
【下载】LAT1392 LTDC RGB接口 LCD的TouchGFX工程的移植步骤
【直播】3月27日,STSAFE-A110安全芯片及ST4SIM eSIM芯片助力安全通信
【线日,基于Buildroot制作STM32MP13启动镜像-深圳/厦门/西安/郑州/苏州
【新品】STM32H5-Arm® Cortex®-M33 内核,主频高达250MHz,提升性能与信息安全性
【新品】STM32MP13X-支持Linux、RTOS和Bare Metal应用,新一代通用工业级MPU
【新品】Arm® Cortex®-M33处理器内核,运行频率160 MHz,基于Armv8-M架构并带有TrustZone®
【下载】AN5129_适合2.4GHz无线信号的低成本PCB天线 基于 BlueNRG-LP ARM Cortex-M0+

在前一篇文章中我们已经学习到能够最终靠直接访问存储地址来读写外设寄存器,下面复习下将 GPIO A3 设为输出模式的代码:* (volatile ui ...
SysTick中断属于核内外设中断器,中断号为-1。想要使用SysTick中断,只需在SysTick查询定时上进行稍微的修改。需要添加开启中断,直接用中 ...
本次操作的SRAM的型号是IS62WV51216,是高速,8M位静态SRAM。它采用ISSI(Intergrated Silicon Solution, Inc)公司的高性能CMOS技术, ...
1总线的由来很多人对总线和地址映射的概念都是一头雾水,但是我们如果知道为何需要总线和地址映射,他们是在什么背景下被衍化出来的,自然 ...
很多应用场合对于功耗的要求很严格,比如长期无人照看的数据采集仪器,可穿戴设备等。其实很多MCU都有相应的低功耗模式,以此来降低设备运 ...

iOS 15.2版发布 Apple Music声控方案 数字遗产功能到来
消息称特斯拉 FSD Beta 辅助驾驶功能 2025 年登陆欧洲,中国最快今年夏天开始测试
美国 ION 公司固态电池新突破:超 125 次循环,容量衰减低于 5%
台积电 2023 年获中国大陆、日本政府补贴 475.45 亿元新台币,同比增长 5.74 倍
热烈庆祝坛友coyoo新书《FPGA设计实战演练》出版,参与讨论即有机会赢新书!
【0元得开发板,还能赢T12焊台,报名倒计时】Follow me,与得捷电子一起解锁开发板超能力!
免费申请英飞凌FMCW雷达解决方案Position2Go,角度,距离,速度,运动方向检测一板搞定!
51单片机PIC单片机AVR单片机ARM单片机嵌入式系统汽车电子消费电子数据处理视频教程电子百科其他技术STM32MSP430单片机资源下载单片机习题与教程词云:
